|
Marilou Open Devices Access (MODA)
|
|
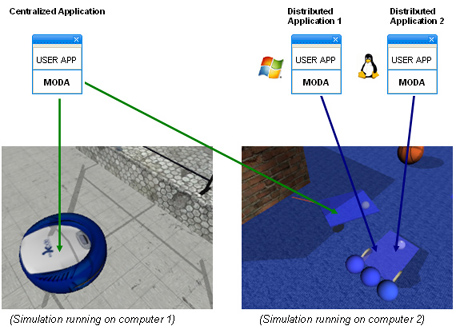
MODA est le SDK qui permet d’accéder aux robots simulés et à leurs équipements (capteurs et actionneurs). Suivant le langage choisi, MODA met à disposition des libraires (.lib) ou Assembly .net (.dll) permettant d’accéder à la simulation par réseau.
L’algorithme, synchronisé sur l’horloge simulée, s’exécute sur n‘importe quelle machine du réseau. Plusieurs programmes peuvent s’exécuter sur le même robot. En outre, un programme MODA peut contrôler plusieurs robots qu’ils soient ou pas dans le même monde.
Les librairies MODA sont open-source et compatibles Windows / Linux.   |
|
Langages:
C/C++, C++ CLI, C#, J#, VB#
|
|
Compilateurs:
Microsoft Visual Studio des versions 6 Ã 2010, DevC++, Borland C++ builder, CodeBlocks et G++ pour Linux.
|
 |
|
|
|
Intempora RTMaps |
|
Les utilisateurs de RTMaps peuvent travailler en simulation avec Marilou : les composants dialoguent avec les capteurs et actionneurs simulés. |
|
|
|
Bonavision iRSP |
|
Vous pouvez programmer vos robots simulés en utilisant le puissant iRSP (intelligent Robot Software Platform) de Bonavision. |
|
|
|
Kineo Kite Lab |
|
Kitelab peut être utilisé pour contrôler des robots simulés dans Marilou en s’appuyant sur le path planning. |
|
|