|
Le Modﺣ۷le de collision
|
 |
|
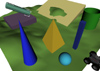
Le modﺣ۷le de collision est composﺣ۸ de gﺣ۸omﺣ۸tries de base:
- Simples : boite, sphﺣ۷re, cylindre, capsule, plan, rayon
- Terrains et grilles d‘ﺣ۸lﺣ۸vation
- Triangles-Mesh (importﺣ۸ depuis un fichier ou issu la librairie intﺣ۸grﺣ۸e)
- Formes convexes
Les gﺣ۸omﺣ۸tries simples ont la propriﺣ۸tﺣ۸ d‘ﺣ۹tre trﺣ۷s rapide et produisent des simulations stables et robustes. Dans certains cas on ne peut se passer de formes plus compliquﺣ۸es : dans ce cas les Triangles-Mesh et les formes convexes sont de trﺣ۷s bons outils.
|
|
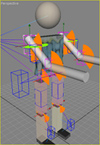
Corps rigides
|
 |
|
Marilou permet d‘assembler les gﺣ۸omﺣ۸tries en corps rigide. L‘utilisateur a la possibilitﺣ۸ soit de calculer lui mﺣ۹me la masse, le centre et la matrice d‘inertie, soit de laisser Marilou calculer ces paramﺣ۷tres automatiquement en tenant compte des formes et paramﺣ۷tres qui constituent le corps rigide. Il est donc possible de crﺣ۸er des effets particuliﺣ۷rement spectaculaires en jouant avec ces paramﺣ۷tres.
Le corps rigide confﺣ۷re aux gﺣ۸omﺣ۸tries que le compose la propriﺣ۸tﺣ۸ dynamique, c‘est ﺣ dire que ces gﺣ۸omﺣ۸tries seront soumises ﺣ la gravitﺣ۸, aux chocs et aux forces d‘une maniﺣ۷re gﺣ۸nﺣ۸rale.
Une gﺣ۸omﺣ۸trie est dite statique si elle n‘est pas contenue dans un corps rigide : dans ce cas, la gravitﺣ۸ ou les chocs avec d‘autres gﺣ۸omﺣ۸tries n‘auront aucune incidence sur cette entitﺣ۸.
La gﺣ۸omﺣ۸trie statique consomme moins de temps CPU et est particuliﺣ۷rement efficace pour modﺣ۸liser de grands espaces ou des bﺣ۱timents par exemple.
|
|
Jointures
|
 |
|
La jointure permet d‘assembler 2 corps rigides : statiques ou n-axes la jointure donne les degrﺣ۸s de libertﺣ۸ d‘un corps rigide par rapport ﺣ l‘autre (fixe, charniﺣ۷re 1 ou 2 axes, universelle, ball & socket, sliders ...)
Elle dispose de paramﺣ۷tres qui simulent un comportement mﺣ۸canique sans avoir ﺣ le modﺣ۸liser : ressort, butﺣ۸es, rﺣ۸sistance, etc. Pour plus de rﺣ۸alisme, une jointure peut ﺣ۹tre ‘cassable‘ et ‘dﺣ۸formable‘.
|
|
|
|